
中国铁路北京局集团有限公司北京科学技术研究所爬壁作业机器人项目
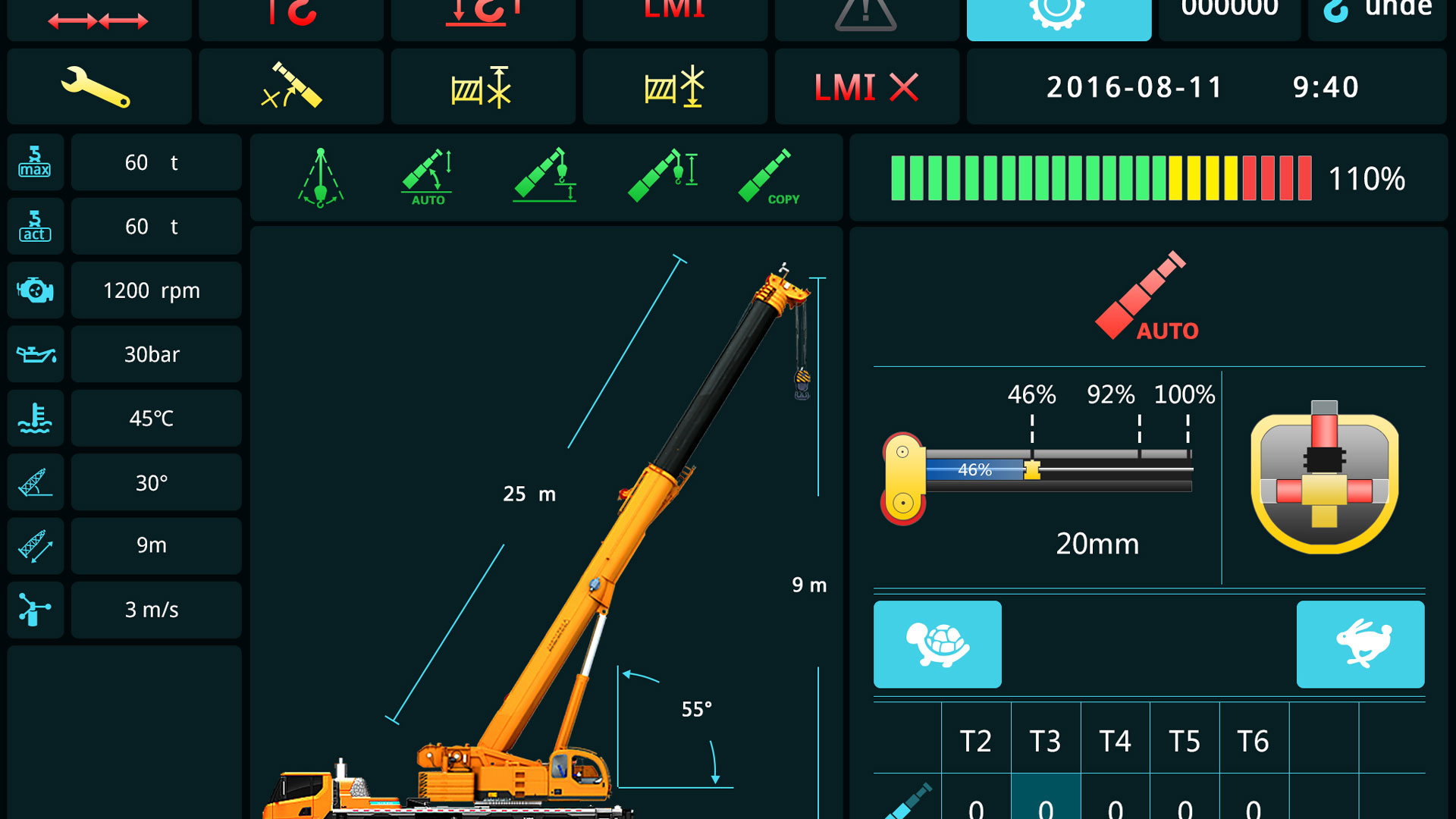
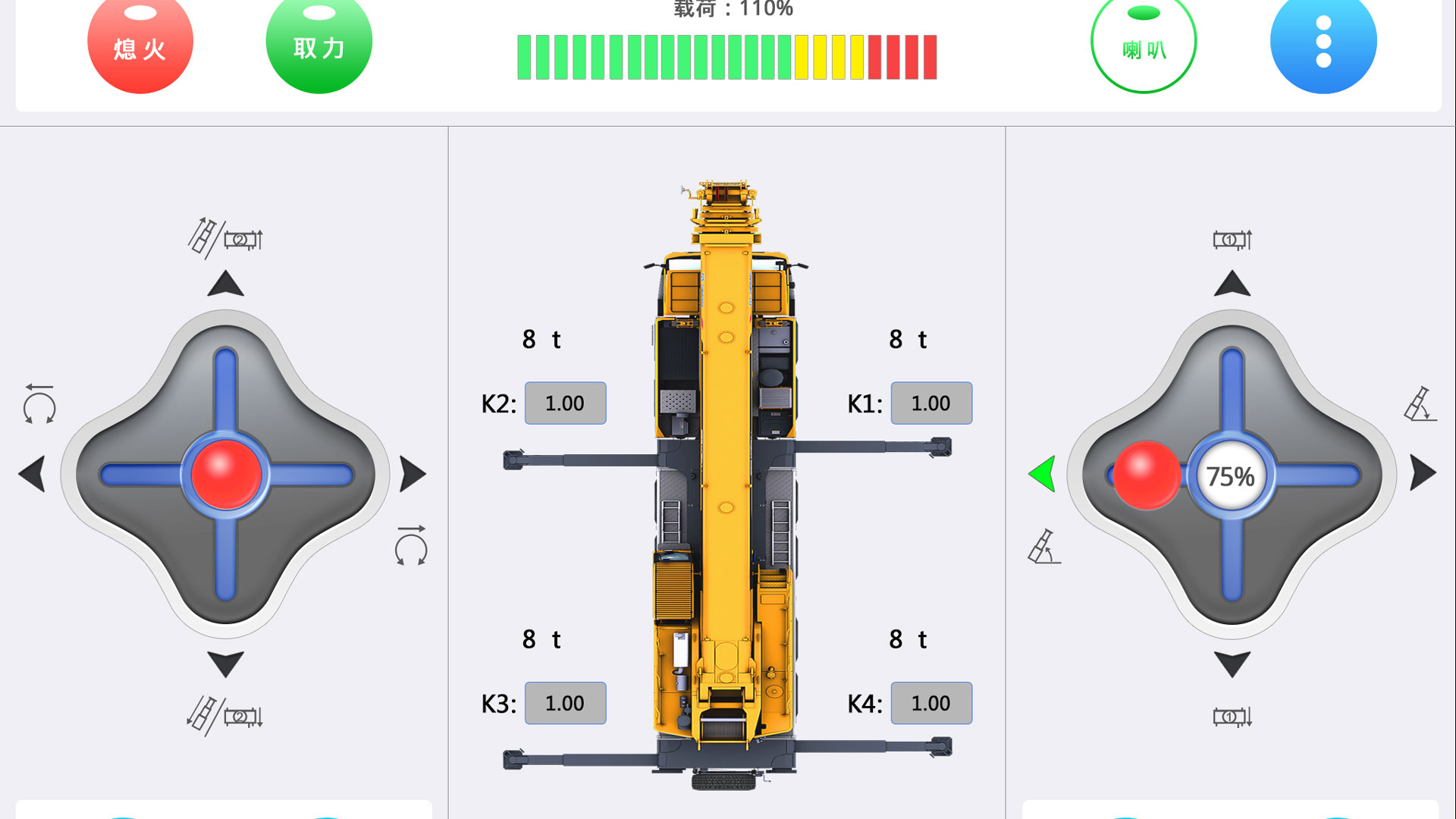
起重机远程智能操控系统采用无线视频技术、无线网络通讯技术,结合平板等智能设备的移动终端软件,当智能设备连接起重机车辆上的无线路由器后,可通过系统实现起重机车辆信息查看、故障诊断、虚拟仪表等功能。帮助徐工集团通过移动终端控制起重机上下车动作与作业,将车辆多方位无线监控视频传输至远程显示器处,使操作者在远程操控的同时,可清晰观察车辆周围状态。
中国铁路北京局集团有限公司北京科学技术研究所爬壁作业机器人项目
起重机远程智能操控系统采用无线视频技术、无线网络通讯技术,结合平板等智能设备的移动终端软件,当智能设备连接起重机车辆上的无线路由器后,可通过系统实现起重机车辆信息查看、故障诊断、虚拟仪表等功能。帮助徐工集团通过移动终端控制起重机上下车动作与作业,将车辆多方位无线监控视频传输至远程显示器处,使操作者在远程操控的同时,可清晰观察车辆周围状态。
建设内容
-
驾驶行驶模拟
通过物理引擎的车辆模拟,实现专业设备车辆的驾驶操作。
-
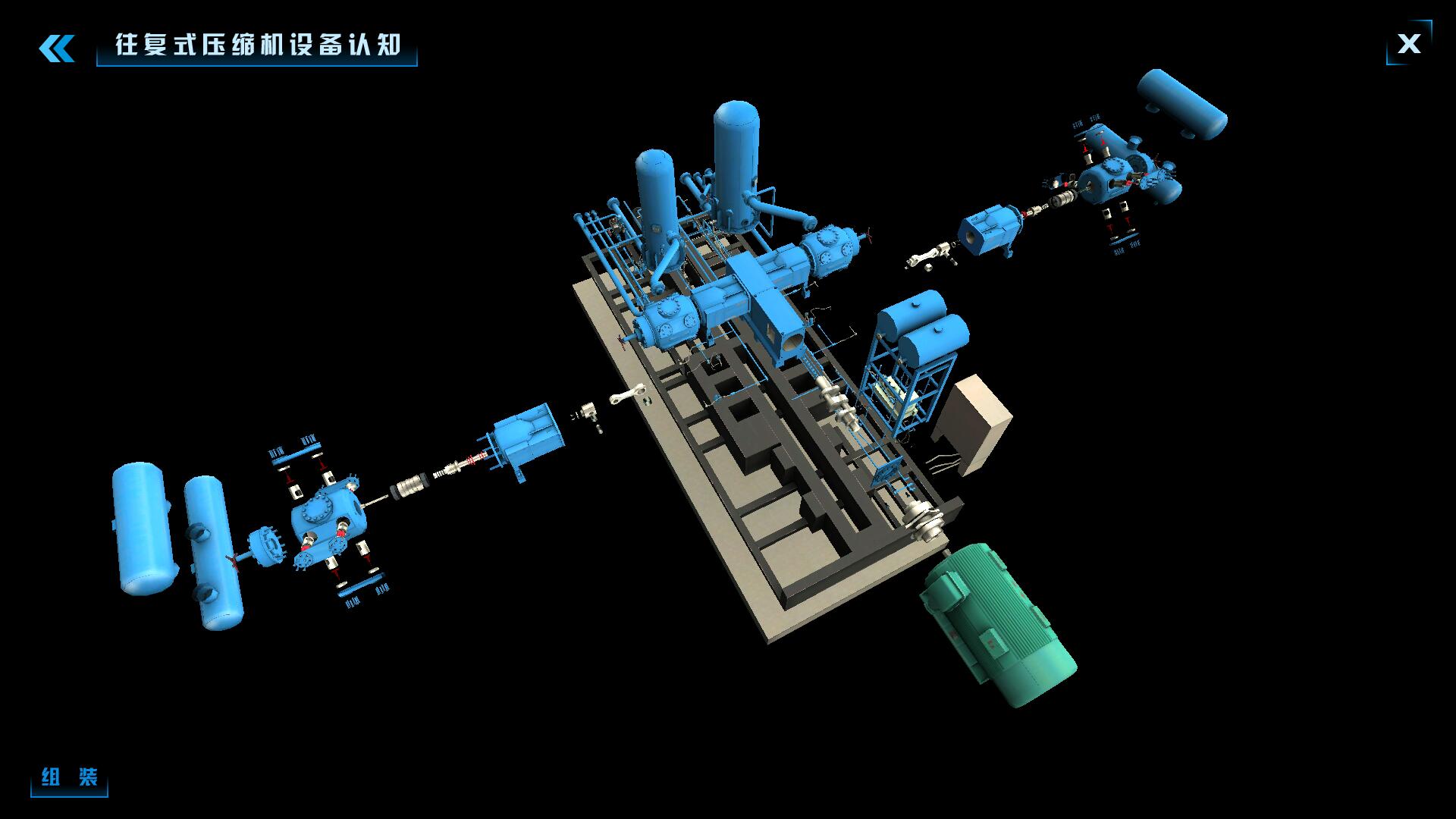
专业操作模拟
专业设备车辆的操作模拟,驾驶员的操作都会伴随实时场景反馈。
-
操作状态模拟
对操作的状态进行细节模拟,例如:起重机吊起物体的过程中,设备的物理细节、被吊物体的物理细节等。
-
操作数据记录
在用户操作训练时,系统自动记录操作过程,可进行回放。
-
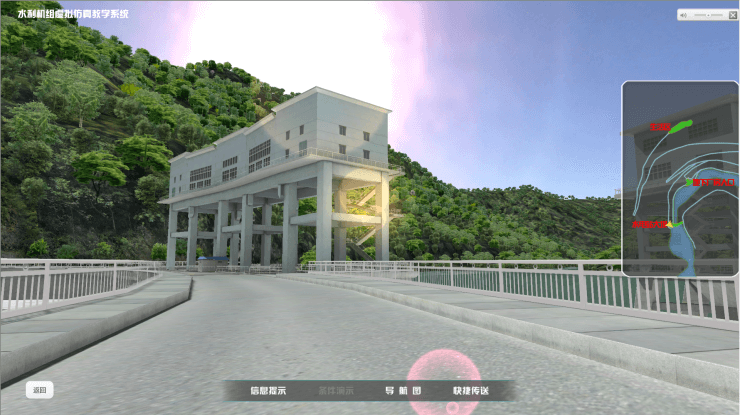
视角切换与导航
具备场景画中画效果,可切换车内与车外两种视角。操作人员还可以通过导航图与指南针功能定位车辆。
项目优势
-
1
沉浸的操作体验
依托虚拟仿真技术,模拟现实场景,进行操作时,虚拟场景呈现相应的操作反馈,给用户真实的驾驶体验。
-
2
安全的精准操作
在虚拟的环境中远程控制起重机工作,精准作业的同时,也不必担心现场隐藏的危险。
-
3
便利的移动终端
系统基于移动终端进行操控,随时随地监管现场的情况。

视频演示
更多优秀案例






联系电话:
0592-5535852
联系邮箱:
service@xmhuaway.com
联系地址:
湖北省武汉市东湖开发区华工园一路现代服务业大厦B座16层


企业公众号
鄂ICP备16014868号-1
华蔚物联科技有限公司版权所有Copyright © 2015-2021
