
玻璃幕墙清洁机器人
玻璃幕墙清洁机器人是一种自动化设备,专为清洁高层建筑、商场、机场等大型玻璃幕墙表面设计,通过智能化技术替代传统人工高空作业。

玻璃幕墙清洁机器人
玻璃幕墙清洁机器人是一种自动化设备,专为清洁高层建筑、商场、机场等大型玻璃幕墙表面设计,通过智能化技术替代传统人工高空作业。
解决方案
解决方案的解决方案的总描述语
-

机械结构设计
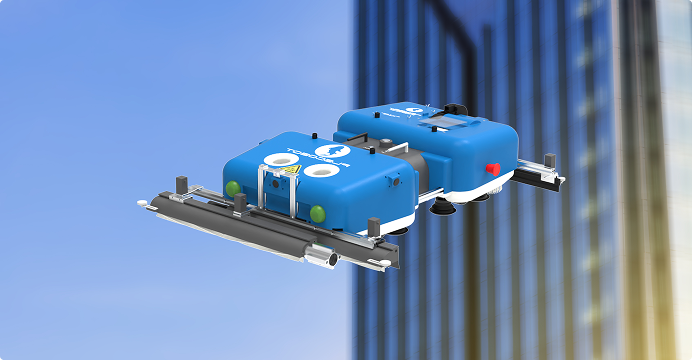
吸附系统:采用真空吸附或者永磁吸附技术,确保机器人能牢牢附着在玻璃幕墙上。真空吸附通过真空泵制造负压,能灵活适应各种光滑玻璃表面;永磁吸附则针对含铁量较高的金属框架玻璃幕墙,提供稳固抓力,无惧高空坠落风险。 清洁刷头与机械臂:配备多组旋转刷头,刷毛材质有尼龙、聚酯纤维等,软硬适中,既能强力去除灰尘、污渍、鸟粪,又避免刮花玻璃。机械臂灵活自如,能多自由度伸展、弯曲,精准覆盖幕墙各个角落,连边缘、缝隙都不放过。 移动底盘:多采用履带式或轮式底盘,履带式抓地力强,适合有一定起伏的幕墙表面;轮式则移动速度快,转向更灵活,两者都保障机器人稳定高效移动。
吸附系统:采用真空吸附或者永磁吸附技术,确保机器人能牢牢附着在玻璃幕墙上。真空吸附通过真空泵制造负压,能灵活适应各种光滑玻璃表面;永磁吸附则针对含铁量较高的金属框架玻璃幕墙,提供稳固抓力,无惧高空坠落风险。 清洁刷头与机械臂:配备多组旋转刷头,刷毛材质有尼龙、聚酯纤维等,软硬适中,既能强力去除灰尘、污渍、鸟粪,又避免刮花玻璃。机械臂灵活自如,能多自由度伸展、弯曲,精准覆盖幕墙各个角落,连边缘、缝隙都不放过。 移动底盘:多采用履带式或轮式底盘,履带式抓地力强,适合有一定起伏的幕墙表面;轮式则移动速度快,转向更灵活,两者都保障机器人稳定高效移动。
-

智能传感系统
距离传感器:利用红外、激光等距离传感器,实时感知机器人与玻璃表面间距,自动调整吸附力度与清洁刷头压力,防止碰撞玻璃,也保障清洁效果均匀。 视觉识别传感器:摄像头搭配图像识别算法,快速定位污渍严重区域,智能规划清洁路线,优先处理顽固污渍,还能识别幕墙框架、窗户轮廓,避开障碍物,实现精细化清洁。 姿态传感器:内置陀螺仪、加速度计,随时监测机器人姿态,一旦发生倾斜、偏移,立即启动纠偏程序,维持机身平稳,确保安全作业。
距离传感器:利用红外、激光等距离传感器,实时感知机器人与玻璃表面间距,自动调整吸附力度与清洁刷头压力,防止碰撞玻璃,也保障清洁效果均匀。 视觉识别传感器:摄像头搭配图像识别算法,快速定位污渍严重区域,智能规划清洁路线,优先处理顽固污渍,还能识别幕墙框架、窗户轮廓,避开障碍物,实现精细化清洁。 姿态传感器:内置陀螺仪、加速度计,随时监测机器人姿态,一旦发生倾斜、偏移,立即启动纠偏程序,维持机身平稳,确保安全作业。
-

清洁流程与工作模式
预湿与洗刷:先对玻璃喷洒专用清洁液,软化干涸污渍,随后刷头高速旋转,多方向反复洗刷,瓦解灰尘与油污的附着。 刮洗与吸干:用橡胶刮条紧随刷头,刮除玻璃表面污水,再通过吸水海绵或负压吸水装置,吸净残留水渍,让玻璃迅速恢复光洁无痕。 多种清洁模式:针对轻度灰尘有快速清扫模式;面对长期未清理的重度污渍,切换至强力深度清洁模式;还能设定分区、定点清洁,满足个性化需求。
预湿与洗刷:先对玻璃喷洒专用清洁液,软化干涸污渍,随后刷头高速旋转,多方向反复洗刷,瓦解灰尘与油污的附着。 刮洗与吸干:用橡胶刮条紧随刷头,刮除玻璃表面污水,再通过吸水海绵或负压吸水装置,吸净残留水渍,让玻璃迅速恢复光洁无痕。 多种清洁模式:针对轻度灰尘有快速清扫模式;面对长期未清理的重度污渍,切换至强力深度清洁模式;还能设定分区、定点清洁,满足个性化需求。
-

操控与通信
遥控操作:配备无线遥控器,操作人员在地面或室内,就能远程控制机器人启停、移动方向、清洁模式切换,操作简便直观,上手快。 智能编程与自动化:支持预设清洁程序,按照设定时间、楼层、幕墙区域自动启动清洁任务,无需人工全程干预,实现无人值守作业。 通信组网:借助 WiFi、蓝牙、ZigBee 等通信技术,机器人与后台管理系统实时传输工作状态、故障信息,方便集中监控与远程诊断。
遥控操作:配备无线遥控器,操作人员在地面或室内,就能远程控制机器人启停、移动方向、清洁模式切换,操作简便直观,上手快。 智能编程与自动化:支持预设清洁程序,按照设定时间、楼层、幕墙区域自动启动清洁任务,无需人工全程干预,实现无人值守作业。 通信组网:借助 WiFi、蓝牙、ZigBee 等通信技术,机器人与后台管理系统实时传输工作状态、故障信息,方便集中监控与远程诊断。

相关案例
从已落地项目中了解更多
与华蔚一起
人工智能驱动特种作业机器人


鄂ICP备16014868号-1
华蔚物联科技有限公司版权所有Copyright © 2015-2021